Robots Learn to Feel What Vision Misses
April 22, 2026
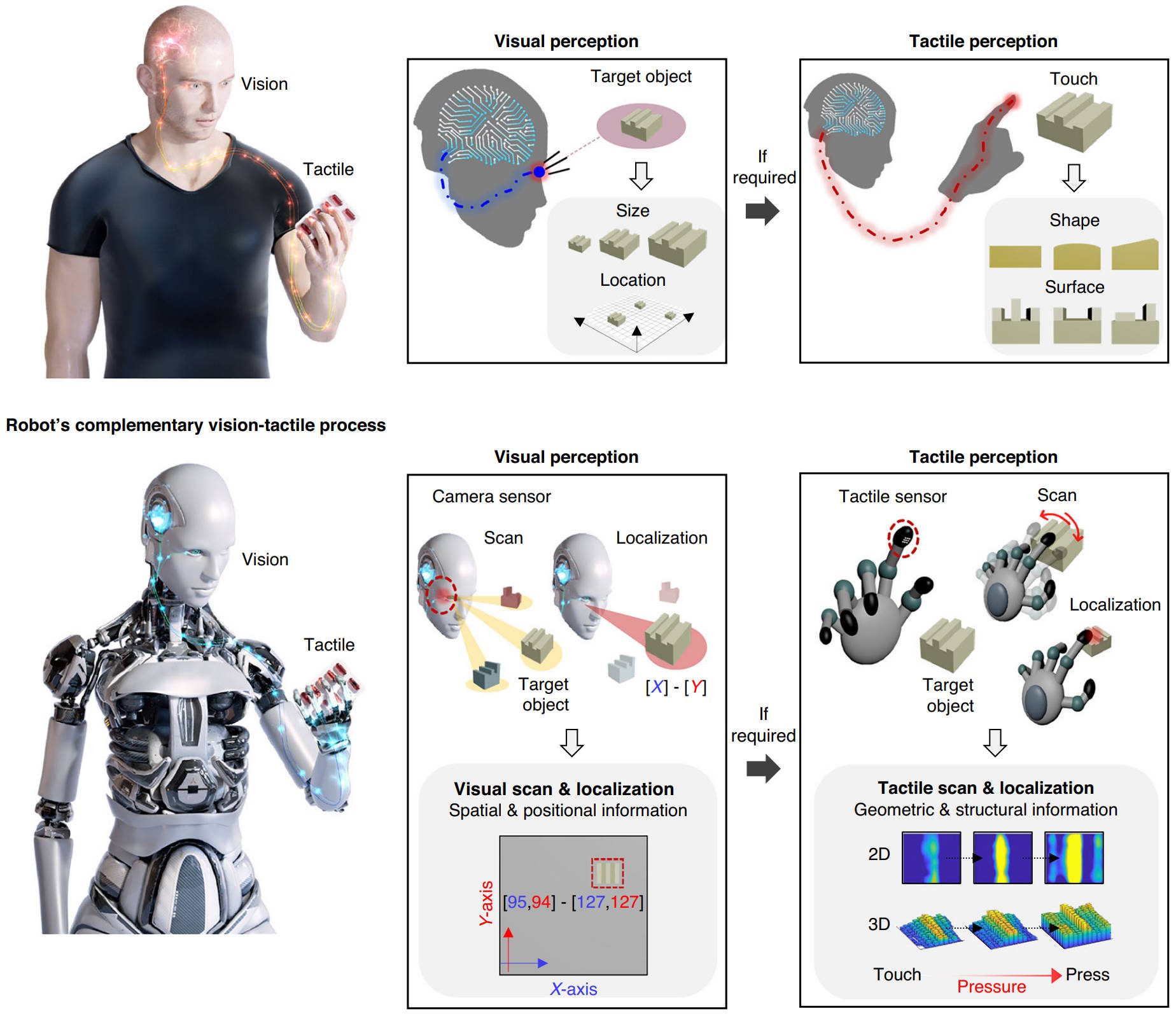
Robots can locate objects with cameras, but that is not always enough when the target is tiny, irregular, or partly hidden. This study presents a complementary perception strategy that combines visual localization with tactile mapping, allowing a robot to first find a target and then read its surface through touch when visual input becomes unreliable. Using a single red-green-blue (RGB)-Depth camera and a soft pressure sensor array made by inkjet printing, the system identified object position, size, and overall geometry through vision, then reconstructed fine surface features and three-dimensional profiles through tactile scanning. The result is a more robust route to perceiving millimeter-sized objects in visually restricted environments.
Source: newswise